背景
GR-ROSEでSG-90を動かす必要があったので試します。
ハードウェア構成
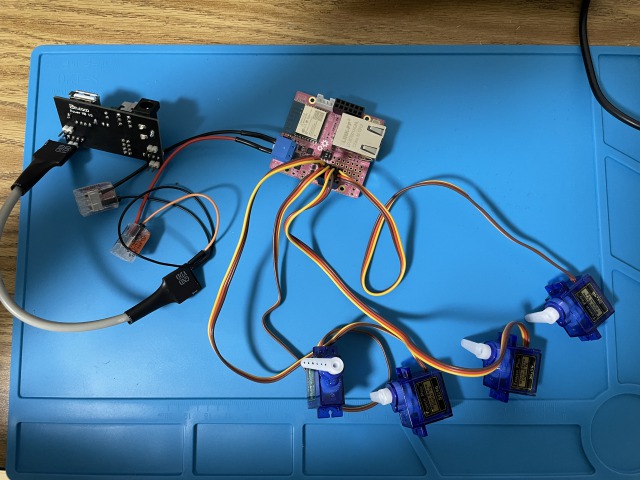
- 電源コネクタに5Vの電源線をつなぎます
- シリアル通信(UART)用コネクタにサーボモーターSG-90をつなぎます
- Servo1:1pin-Vm-G
- Servo2:3pin-Vm-G
- Servo3:5pin-Vm-G
- Servo4:7pin-Vm-G
- ピンアサインはGR-ROSEのページより「GR-ROSEピンマップ」を参照のこと
つないだ様子
動作の様子
ソース
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
| #include <Arduino.h>
#include <servo.h>
#define INTERVAL 5000
Servo servo1;
Servo servo2;
Servo servo3;
Servo servo4;
void setup()
{
servo1.attach(1);
servo2.attach(3);
servo3.attach(5);
servo4.attach(7);
}
void loop() {
servo1.write(0);
servo2.write(0);
servo3.write(0);
servo4.write(0);
delay(INTERVAL);
servo1.write(180);
servo2.write(180);
servo3.write(180);
servo4.write(180);
delay(INTERVAL);
}
|